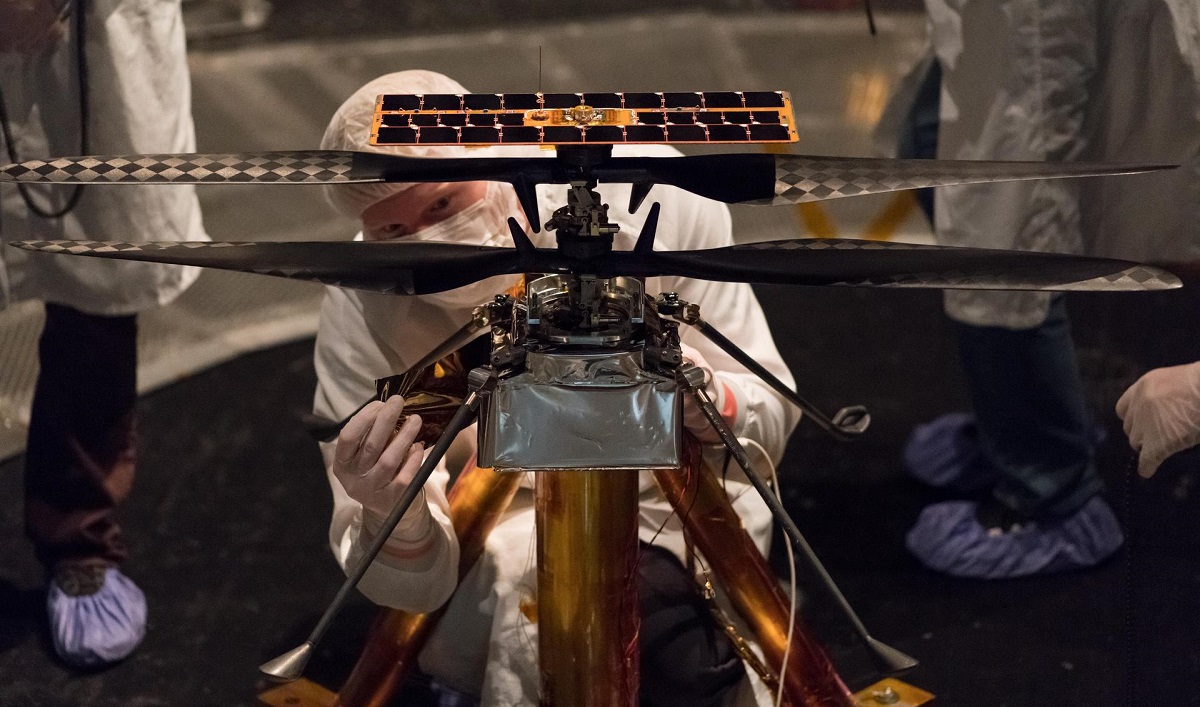
Vài ngày trước đại diện của cơ quan vũ trụ NASA, trong một cuộc phỏng vấn với Spectrum IEEE, tiết lộ thông tin chi tiết về trực thăng trinh sát tự hành Ingenuity, đã hạ cánh thành công lên sao Hỏa trong khuôn khổ sứ mệnh Mars 2020.
Một tính năng đặc biệt của dự án là việc sử dụng bảng điều khiển dựa trên Qualcomm Snapdragon 801 SoC, được sử dụng trong sản xuất điện thoại thông minh. Phần mềm Ingenuity dựa trên nhân Linux và phần mềm bay mã nguồn mở.
Cần lưu ý rằng đây là lần đầu tiên sử dụng Linux trên tàu vũ trụ được chuyển đến Martvà. Ngoài ra, việc sử dụng phần mềm mã nguồn mở và các thành phần phần cứng có sẵn trên thị trường cho phép những người đam mê quan tâm có thể tự mình lắp ráp các máy bay không người lái tương tự.
Quyết định này là do việc điều khiển một chiếc máy bay không người lái đòi hỏi khả năng tính toán cao hơn nhiều so với việc điều khiển một chiếc rover, vốn được trang bị những con chip được chế tạo đặc biệt với khả năng chống bức xạ bổ sung. Ví dụ, việc duy trì chuyến bay yêu cầu hoạt động của vòng điều khiển với tốc độ 500 chu kỳ / giây, cũng như phân tích hình ảnh với tốc độ 30 khung hình / giây.
Snapdragon 801 SoC (Lõi tứ, 2,26 GHz, RAM 2GB, Flash 32 GB) được sử dụng để cung cấp một môi trường hệ thống dựa trên Linux cơ bản, chịu trách nhiệm cho các hoạt động cấp cao như điều hướng trực quan dựa trên phân tích hình ảnh camera, quản lý dữ liệu, xử lý lệnh, tạo đo từ xa và duy trì các kênh truyền thông không dây.
Bộ xử lý kết nối qua giao diện UART với hai bộ vi điều khiển (MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 KB RAM, 4 MB Flash, UART, SPI, GPIO) thực hiện các chức năng điều khiển chuyến bay.
Hai bộ vi điều khiển được sử dụng để dự phòng trong trường hợp hỏng và nhận thông tin giống hệt nhau từ các cảm biến. Chỉ có một bộ vi điều khiển hoạt động và bộ vi điều khiển thứ hai được sử dụng như một bộ phận dự phòng và trong trường hợp hỏng hóc nó có thể kiểm soát. FPGA MicroSemi ProASIC3L chịu trách nhiệm truyền dữ liệu từ cảm biến đến vi điều khiển và tương tác với các bộ truyền động điều khiển các cánh quạt, bộ điều khiển này cũng chuyển sang bộ vi điều khiển thay thế trong trường hợp hỏng hóc.
Của nhóm, máy bay không người lái sử dụng máy đo độ cao laser SparkFun Electronics, một công ty phần cứng nguồn mở và là một trong những người tạo ra định nghĩa về phần cứng nguồn mở (OSHW). Trong số các thành phần tiêu biểu khác, nổi bật là bộ ổn định con quay hồi chuyển (IMU) và máy quay video được sử dụng trong điện thoại thông minh.
Một máy ảnh VGA được sử dụng để theo dõi vị trí, hướng và tốc độ thông qua so sánh từng khung hình. Máy ảnh màu 13 megapixel thứ hai được sử dụng để tạo ra hình ảnh của khu vực.
Tim Canham của JPL nói với chúng ta rằng Đưa Ingenuity lên sao Hỏa và cất cánh rồi hạ cánh dù chỉ một lần là một chiến thắng chắc chắn đối với NASA.
Canham đã giúp phát triển kiến trúc phần mềm chạy Ingenuity. Với tư cách là trưởng bộ phận hoạt động của Ingenuity, anh ấy hiện đang tập trung vào việc lập kế hoạch chuyến bay và phối hợp với nhóm điều khiển Perseverance. Chúng tôi đã nói chuyện với Canham để hiểu rõ hơn về cách Ingenuity sẽ dựa vào quyền tự chủ cho các chuyến bay sắp tới đến sao Hỏa.
Các thành phần phần mềm điều khiển chuyến bay được phát triển tại JPL (Phòng thí nghiệm Sức đẩy Phản lực) của NASA cho các vệ tinh nhân tạo trên mặt đất nhỏ và siêu nhỏ (cubsats) và đã được phát triển trong vài năm như một phần của nền tảng mở F Prime (F´), được phân phối dưới Giấy phép Apache 2.0.
F Prime cung cấp các công cụ để phát triển nhanh chóng các hệ thống điều khiển chuyến bay và các ứng dụng nhúng liên quan. Phần mềm máy bay được chia thành các thành phần riêng lẻ với các giao diện lập trình được xác định rõ ràng.
Ngoài các thành phần chuyên biệt, khung C ++ được cung cấp với việc triển khai các tính năng như xếp hàng tin nhắn và đa luồng, cũng như các công cụ mô hình hóa cho phép bạn liên kết các thành phần và tự động tạo mã.
Cuối cùng nếu bạn muốn biết thêm về nó, bạn có thể tham khảo liên kết sau.