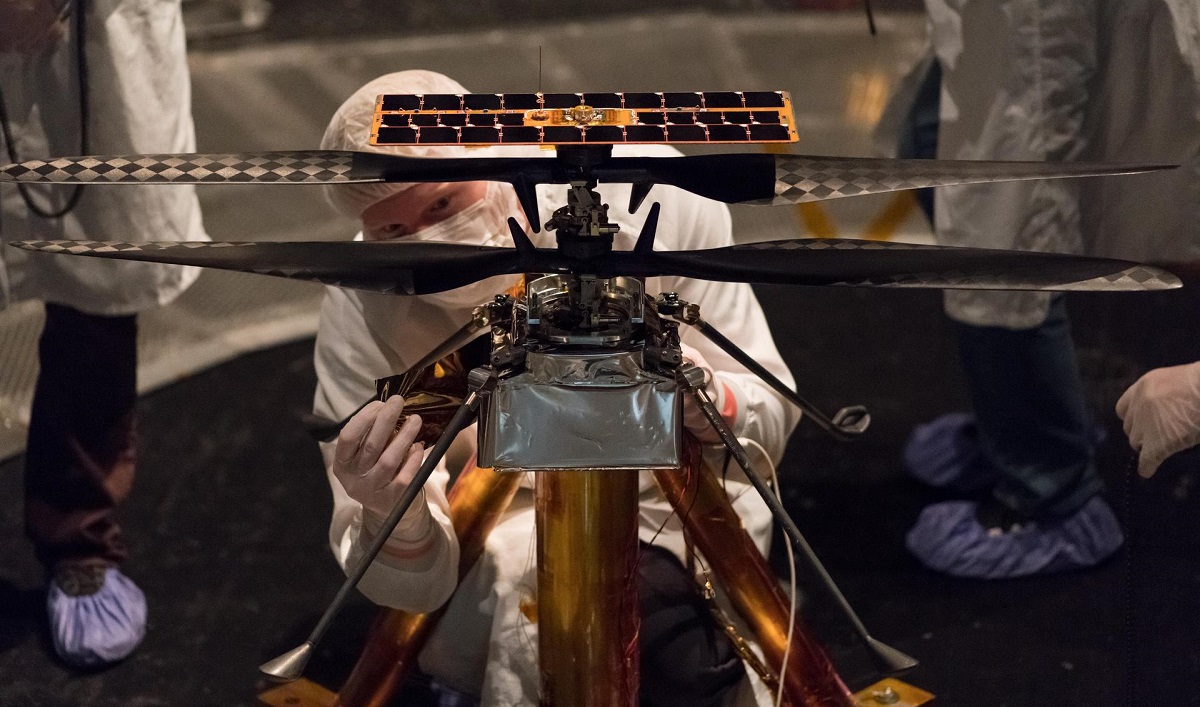
几天前 美国宇航局航天局代表,在接受Spectrum IEEE采访时透露了有关Ingenuity自主侦察直升机的详细信息,这是火星2020任务的一部分,成功登陆火星。
特色 项目的 使用基于Qualcomm Snapdragon 801 SoC的控制板,用于生产智能手机。 独创性软件基于Linux内核和开源飞行软件。
应当指出的是,这是Linux在运往Mart的航天器上的首次使用和。 此外,使用开放源代码软件和可商购的硬件组件,使感兴趣的发烧友可以自行组装类似的无人机。
该决定是由于以下事实:控制飞行无人机比控制流动站需要更多的计算能力,流动站配备了带有额外辐射防护功能的特制芯片。 例如,保持飞行需要控制环以每秒500个循环的速率运行,以及图像分析以每秒30帧的速率运行。
骁龙801 SoC (四核2,26GHz,2GB RAM,32GB闪存) 用于提供基本的基于Linux的系统环境,该环境负责操作 高级别的功能,例如基于摄像机图像分析的视觉导航,数据管理,命令处理,遥测生成和无线通信通道的维护。
处理器 通过UART接口连接到两个微控制器 (MCU德州仪器(TI)TMS570LC43x,ARM Cortex-R5F,300 MHz,512 KB RAM,4 MB闪存,UART,SPI,GPIO)执行飞行控制功能。
这两个微控制器用于故障情况下的冗余 并从传感器接收相同的信息。 只有一个微控制器处于活动状态,第二个微控制器用作备用,万一发生故障,它可以控制。 FPGA MicroSemi ProASIC3L负责将数据从传感器传输到微控制器 并与控制刀片的执行器进行交互,如果发生故障,执行器也会切换到备用微控制器。
在团队中 无人机使用SparkFun Electronics激光高度计是一家开源硬件公司,也是开源硬件(OSHW)定义的创建者之一。 在其他典型组件中,智能手机中使用的陀螺稳定器(IMU)和摄像机脱颖而出。
VGA摄像头用于跟踪位置,方向和速度 通过逐帧比较。 第二个13兆像素彩色相机用于创建该区域的图像。
JPL的蒂姆·坎纳姆(Tim Canham)告诉我们,将独创性带给火星,让它一次升空和降落对NASA无疑是一次胜利。
Canham帮助开发了运行Ingenuity的软件体系结构。 作为Ingenuity的运营负责人,他现在专注于飞行计划以及与恒心漫游者团队的协调。 我们与Canham进行了交谈,以更好地了解Ingenuity在下一次飞往火星的过程中将如何依靠自主性。
飞行控制软件组件是由NASA的喷气推进实验室(JPL)开发的,用于小型和超小型人造地球卫星(cubsats),并已作为开放平台F Prime(F´)的一部分开发了数年,并在Apache 2.0许可证。
F Prime提供了用于快速开发飞行控制系统的工具 和相关的嵌入式应用程序。 飞行软件分为具有明确定义的编程界面的各个组件。
除了专用组件之外,C ++框架还提供了诸如消息队列和多线程等功能的实现,以及允许您链接组件并自动生成代码的建模工具。
最后 如果您有兴趣了解更多信息,你可以咨询 以下链接。