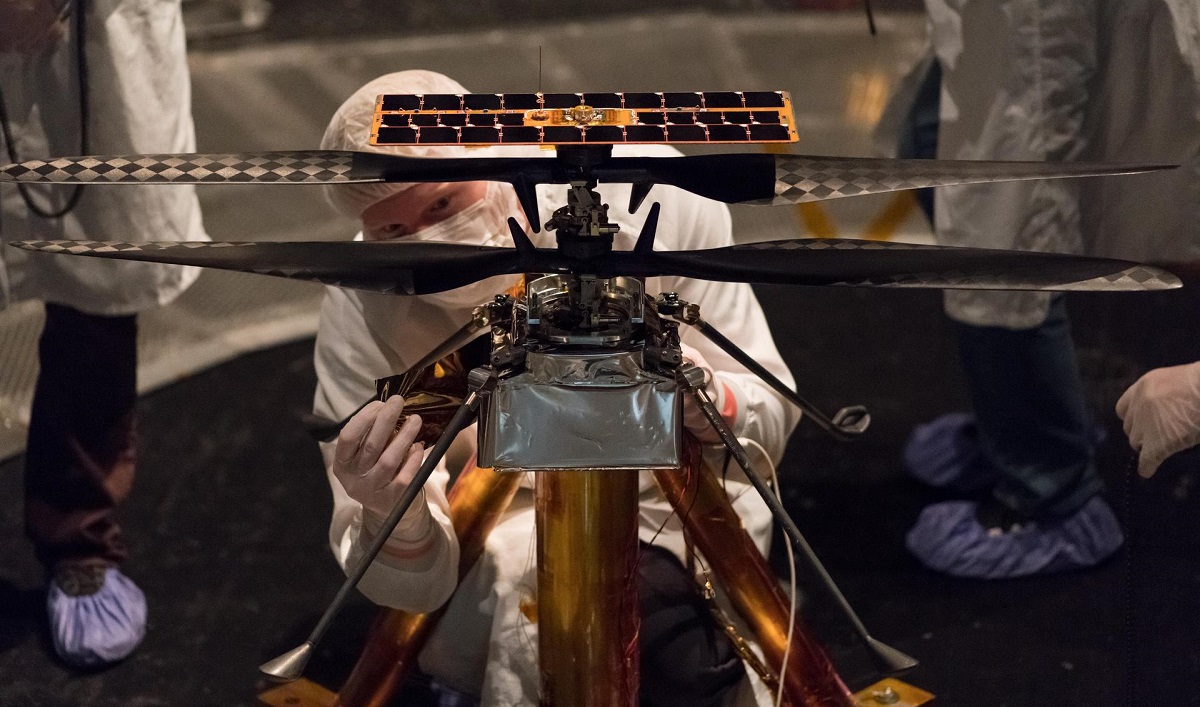
幾天前 美國宇航局航天局代表,在接受Spectrum IEEE採訪時透露了有關Ingenuity自主偵察直升機的詳細信息,這是火星2020任務的一部分,成功登陸火星。
特色 項目的 使用基於Qualcomm Snapdragon 801 SoC的控制板,用於生產智能手機。 獨創性軟件基於Linux內核和開源飛行軟件。
應當指出的是,這是Linux在運往Mart的航天器上的首次使用和。 此外,使用開放源代碼軟件和可商購的硬件組件使感興趣的發燒友可以自行組裝類似的無人機。
該決定是由於以下事實:控制飛行無人機比控制流動站需要更多的計算能力,流動站配備了帶有額外輻射防護功能的特殊芯片。 例如,保持飛行需要控制環以每秒500個循環的速率進行操作,以及以每秒30幀的速率進行圖像分析。
驍龍801 SoC (四核,2,26GHz,2GB RAM,32GB閃存) 用於提供基本的基於Linux的系統環境,該環境負責操作 高級別的功能,例如基於攝像機圖像分析的視覺導航,數據管理,命令處理,遙測生成以及無線通信通道的維護。
處理器 通過UART接口連接到兩個微控制器 (MCU德州儀器(TI)TMS570LC43x,ARM Cortex-R5F,300 MHz,512 KB RAM,4 MB閃存,UART,SPI,GPIO)執行飛行控制功能。
兩個微控制器用於故障情況下的冗餘 並從傳感器接收相同的信息。 只有一個微控制器處於活動狀態,第二個微控制器用作備用,萬一發生故障,它可以控制。 FPGA MicroSemi ProASIC3L負責將數據從傳感器傳輸到微控制器 並與控製刀片的執行器進行交互,如果發生故障,執行器也會切換到備用微控制器。
在團隊中 無人機使用SparkFun Electronics激光高度計是一家開源硬件公司,也是開源硬件(OSHW)定義的創建者之一。 在其他典型組件中,智能手機中使用的陀螺穩定器(IMU)和攝像機脫穎而出。
VGA攝像機用於跟踪位置,方向和速度 通過逐幀比較。 第二個13兆像素彩色相機用於創建該區域的圖像。
JPL的蒂姆·坎納姆(Tim Canham)告訴我們,將獨創性帶入火星並使其一次升空降落對NASA來說是一次絕對的勝利。
Canham幫助開發了運行Ingenuity的軟件體系結構。 作為Ingenuity的運營負責人,他現在專注於飛行計劃以及與恆心漫遊者團隊的協調。 我們與Canham進行了交談,以更好地了解Ingenuity如何在即將到來的火星飛行中依靠自主權。
飛行控制軟件組件是由NASA的噴氣推進實驗室(JPL)開發的,用於小型和超小型人造地球衛星(cubsats),並已作為開放式平台F Prime(F´)的一部分開發了數年,並在Apache 2.0許可證。
F Prime提供了用於快速開發飛行控制系統的工具 和相關的嵌入式應用程序。 飛行軟件分為具有明確定義的編程界面的各個組件。
除了專用組件之外,C ++框架還提供了諸如消息隊列和多線程等功能的實現,以及允許您鏈接組件並自動生成代碼的建模工具。
終於 如果您有興趣了解更多信息,你可以諮詢 以下鏈接。