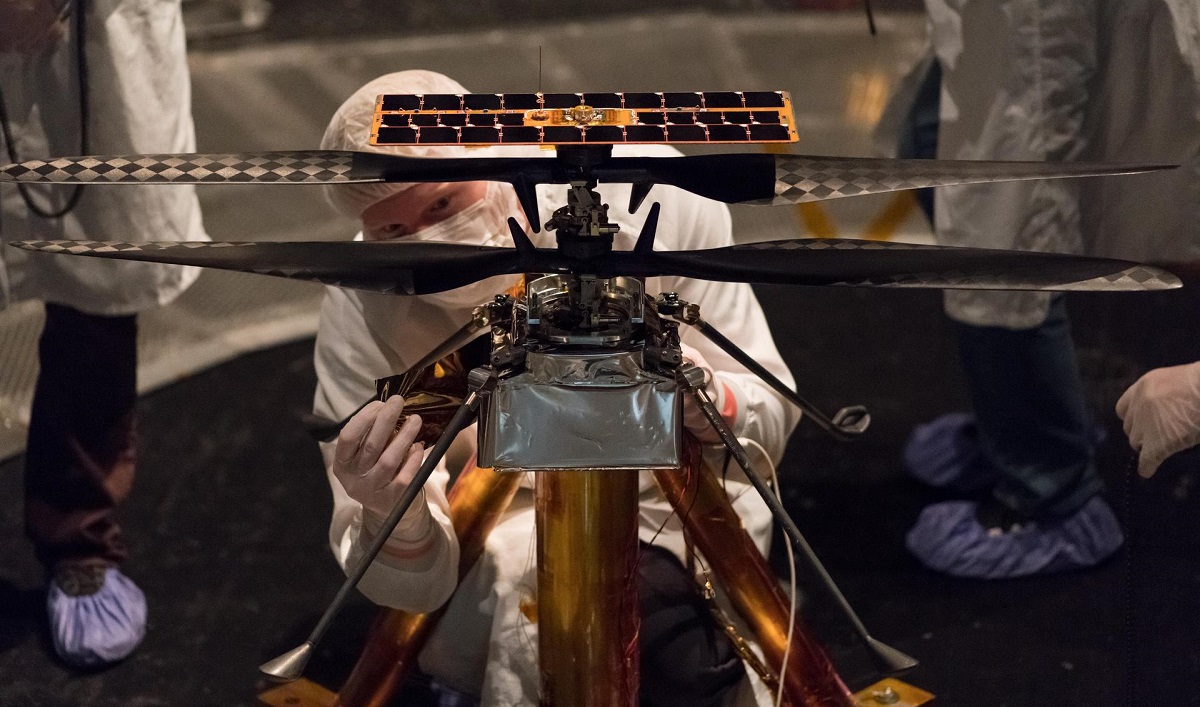
Vor ein paar Tagen Vertreter der NASA-Weltraumbehörde, in einem Interview mit Spectrum IEEEenthüllte Details über den autonomen Aufklärungshubschrauber Ingenuity, die im Rahmen der Mission Mars 2020 erfolgreich auf dem Mars gelandet sind.
Eine Besonderheit Projekt war die Verwendung einer Qualcomm Snapdragon 801 SoC-basierten Steuerkarte, die bei der Herstellung von Smartphones verwendet wird. Die Ingenuity-Software basiert auf dem Linux-Kernel und der Open-Source-Flugsoftware.
Es ist zu beachten, dass dies die erste Verwendung von Linux auf Raumfahrzeugen ist, die an Mart ausgeliefert werdenund. Durch die Verwendung von Open Source-Software und im Handel erhältlichen Hardwarekomponenten können interessierte Enthusiasten ähnliche Drohnen selbst zusammenbauen.
Diese Entscheidung beruht auf der Tatsache, dass die Steuerung einer fliegenden Drohne viel mehr Rechenleistung erfordert als die Steuerung eines Rovers, der mit speziell angefertigten Chips mit zusätzlichem Strahlenschutz ausgestattet ist. Zum Aufrechterhalten des Fluges muss beispielsweise der Regelkreis mit einer Geschwindigkeit von 500 Zyklen pro Sekunde betrieben werden sowie eine Bildanalyse mit einer Geschwindigkeit von 30 Bildern pro Sekunde.
Der Snapdragon 801 SoC (Quad Core 2,26 GHz, 2 GB RAM, 32 GB Flash) wird verwendet, um eine grundlegende Linux-basierte Systemumgebung bereitzustellen, die für den Betrieb verantwortlich ist von hohem Niveau wie visuelle Navigation basierend auf Kamerabildanalyse, Datenverwaltung, Befehlsverarbeitung, Telemetrieerzeugung und Wartung von drahtlosen Kommunikationskanälen.
Prozessor Verbindung über UART-Schnittstelle mit zwei Mikrocontrollern (MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 KB RAM, 4 MB Flash, UART, SPI, GPIO), die Flugsteuerungsfunktionen ausführen.
Die beiden Mikrocontroller dienen der Redundanz im Fehlerfall und erhalten identische Informationen von den Sensoren. Es ist nur ein Mikrocontroller aktiv, und der zweite wird als Ersatz verwendet und kann im Fehlerfall die Kontrolle übernehmen. FPGA MicroSemi ProASIC3L ist für die Übertragung von Daten von Sensoren zu Mikrocontrollern verantwortlich und mit den Aktuatoren zu interagieren, die die Schaufeln steuern, die im Falle eines Ausfalls auch auf einen Ersatz-Mikrocontroller umschalten.
Von dem Team, Die Drohne verwendet einen SparkFun Electronics-Laserhöhenmesser, ein Open-Source-Hardware-Unternehmen und einer der Schöpfer der Definition von Open-Source-Hardware (OSHW). Unter anderen typischen Komponenten stechen der Gyrostabilisator (IMU) und die in Smartphones verwendeten Videokameras hervor.
Eine VGA-Kamera wird verwendet, um den Ort, die Richtung und die Geschwindigkeit zu verfolgen durch Einzelbildvergleiche. Die zweite 13-Megapixel-Farbkamera wird verwendet, um Bilder des Bereichs zu erstellen.
Einfallsreichtum in einem Stück zum Mars zu bringen und ihn auch nur einmal abheben und landen zu lassen, ist ein definitiver Sieg für die NASA, sagt Tim Canham von JPL.
Canham half bei der Entwicklung der Softwarearchitektur, auf der Ingenuity ausgeführt wird. Als Operations Leader von Ingenuity konzentriert er sich nun auf die Flugplanung und die Koordination mit dem Perseverance Rover-Team. Wir haben mit Canham gesprochen, um besser zu verstehen, wie Ingenuity bei seinen bevorstehenden Flügen zum Mars auf Autonomie angewiesen ist.
Die Komponenten der Flugsteuerungssoftware wurden am JPL (Jet Propulsion Laboratory) der NASA für kleine und ultrakleine künstliche terrestrische Satelliten (Cubsats) entwickelt und seit mehreren Jahren als Teil der offenen Plattform F Prime (F´) entwickelt, die unter der Apache 2.0 Lizenz.
F Prime bietet die Werkzeuge für die schnelle Entwicklung von Flugsteuerungssystemen und verwandte eingebettete Anwendungen. Die Flugsoftware ist in einzelne Komponenten mit genau definierten Programmierschnittstellen unterteilt.
Zusätzlich zu den spezialisierten Komponenten wird ein C ++ - Framework mit der Implementierung von Funktionen wie Nachrichtenwarteschlange und Multithreading sowie Modellierungswerkzeugen bereitgestellt, mit denen Sie Komponenten verknüpfen und automatisch Code generieren können.
Schließlich wenn Sie mehr darüber wissen möchtenkönnen Sie konsultieren den folgenden Link.