ไม่กี่วันที่ผ่านมา ตัวแทนขององค์การอวกาศ NASAในการให้สัมภาษณ์กับ Spectrum IEEEเปิดเผยรายละเอียดเกี่ยวกับเฮลิคอปเตอร์ลาดตระเวนอัตโนมัติ Ingenuityซึ่งประสบความสำเร็จในการลงจอดบนดาวอังคารซึ่งเป็นส่วนหนึ่งของภารกิจ Mars 2020
คุณสมบัติพิเศษ ของโครงการ คือการใช้บอร์ดควบคุมที่ใช้ Qualcomm Snapdragon 801 SoCซึ่งใช้ในการผลิตสมาร์ทโฟน ซอฟต์แวร์ Ingenuity ขึ้นอยู่กับเคอร์เนล Linux และซอฟต์แวร์การบินโอเพ่นซอร์ส
ควรสังเกตว่านี่เป็นการใช้ Linux ครั้งแรกบนยานอวกาศที่ส่งไปยัง Martและ. นอกจากนี้การใช้ซอฟต์แวร์โอเพนซอร์สและส่วนประกอบฮาร์ดแวร์ที่มีจำหน่ายในท้องตลาดช่วยให้ผู้ที่สนใจสามารถประกอบโดรนที่คล้ายกันได้ด้วยตัวเอง
การตัดสินใจนี้เกิดจากข้อเท็จจริงที่ว่าการควบคุมโดรนที่บินได้นั้นต้องใช้พลังในการประมวลผลมากกว่าการควบคุมรถแลนด์โรเวอร์ซึ่งติดตั้งชิปที่สั่งทำพิเศษพร้อมการป้องกันรังสีเพิ่มเติม ตัวอย่างเช่นการรักษาการบินต้องใช้การทำงานของลูปควบคุมในอัตรา 500 รอบต่อวินาทีเช่นเดียวกับการวิเคราะห์ภาพในอัตรา 30 เฟรมต่อวินาที
Snapdragon 801 SoC (Quad Core, 2,26GHz, RAM 2GB, แฟลช 32GB) ใช้เพื่อจัดเตรียมสภาพแวดล้อมระบบพื้นฐานบน Linux ซึ่งรับผิดชอบการดำเนินการ ระดับสูงเช่นการนำทางด้วยภาพโดยอาศัยการวิเคราะห์ภาพจากกล้องการจัดการข้อมูลการประมวลผลคำสั่งการสร้างมาตรวัดระยะไกลและการบำรุงรักษาช่องทางการสื่อสารไร้สาย
หน่วยประมวลผล เชื่อมต่อผ่านอินเทอร์เฟซ UART กับไมโครคอนโทรลเลอร์สองตัว (MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 KB RAM, 4 MB Flash, UART, SPI, GPIO) ที่ทำหน้าที่ควบคุมการบิน
ไมโครคอนโทรลเลอร์สองตัวใช้สำหรับการทำซ้ำซ้อนในกรณีที่เกิดความล้มเหลว และรับข้อมูลที่เหมือนกันจากเซ็นเซอร์ ไมโครคอนโทรลเลอร์เพียงตัวเดียวเท่านั้นที่ใช้งานได้และตัวที่สองใช้เป็นอะไหล่สำรองและในกรณีที่เกิดความล้มเหลวก็สามารถควบคุมได้ FPGA MicroSemi ProASIC3L ทำหน้าที่ในการถ่ายโอนข้อมูลจากเซ็นเซอร์ไปยังไมโครคอนโทรลเลอร์ และโต้ตอบกับแอคชูเอเตอร์ที่ควบคุมใบพัดซึ่งจะเปลี่ยนไปใช้ไมโครคอนโทรลเลอร์ทดแทนในกรณีที่เกิดความล้มเหลว
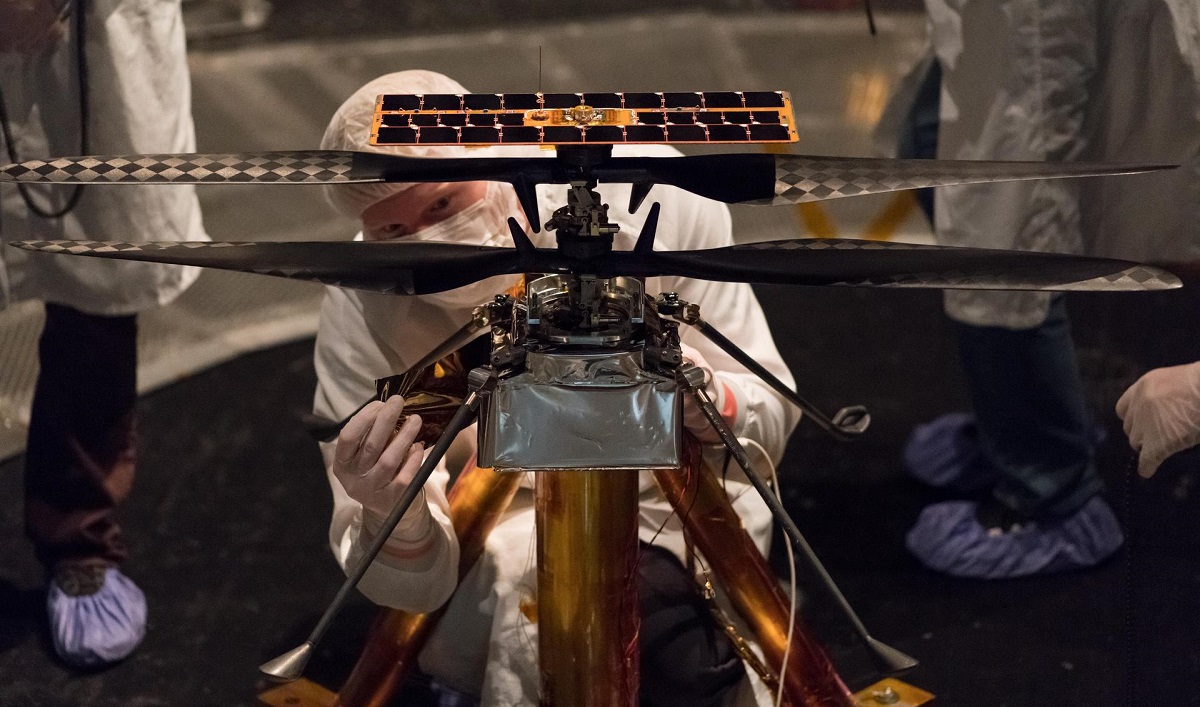
ของทีม โดรนใช้เครื่องวัดระยะสูงด้วยเลเซอร์ SparkFun Electronicsบริษัท ฮาร์ดแวร์โอเพ่นซอร์สและเป็นหนึ่งในผู้สร้างนิยามของฮาร์ดแวร์โอเพนซอร์ส (OSHW) ในบรรดาส่วนประกอบทั่วไปอื่น ๆ ไจโรสเตบิไลเซอร์ (IMU) และกล้องวิดีโอที่ใช้ในสมาร์ทโฟนนั้นโดดเด่น
กล้อง VGA ใช้เพื่อติดตามตำแหน่งทิศทางและความเร็ว ผ่านการเปรียบเทียบแบบเฟรมต่อเฟรม กล้องสี 13 ล้านพิกเซลตัวที่สองใช้เพื่อสร้างภาพของพื้นที่
Tim Canham จาก JPL บอกเราว่าการนำความฉลาดไปสู่ดาวอังคารเป็นชิ้นเดียว
Canham ช่วยพัฒนาสถาปัตยกรรมซอฟต์แวร์ที่รัน Ingenuity ในฐานะหัวหน้าฝ่ายปฏิบัติการของ Ingenuity ตอนนี้เขามุ่งเน้นไปที่การวางแผนการบินและการประสานงานกับทีมรถแลนด์โรเวอร์ Perseverance เราได้พูดคุยกับ Canham เพื่อทำความเข้าใจให้ดียิ่งขึ้นว่า Ingenuity จะพึ่งพาเอกราชสำหรับเที่ยวบินที่กำลังจะมาถึงดาวอังคารได้อย่างไร
ส่วนประกอบซอฟต์แวร์ควบคุมการบินได้รับการพัฒนาที่ JPL (Jet Propulsion Laboratory) ของ NASA สำหรับดาวเทียมประดิษฐ์ภาคพื้นดินขนาดเล็กและขนาดเล็กพิเศษและได้รับการพัฒนาเป็นเวลาหลายปีโดยเป็นส่วนหนึ่งของแพลตฟอร์มแบบเปิด F Prime (F´) ซึ่งจัดจำหน่ายภายใต้ ใบอนุญาต Apache 2.0
F Prime มีเครื่องมือสำหรับการพัฒนาระบบควบคุมการบินอย่างรวดเร็ว และโปรแกรมฝังตัวที่เกี่ยวข้อง ซอฟต์แวร์การบินแบ่งออกเป็นส่วนประกอบแต่ละส่วนพร้อมด้วยอินเตอร์เฟสการเขียนโปรแกรมที่กำหนดไว้อย่างดี
นอกเหนือจากส่วนประกอบพิเศษแล้วเฟรมเวิร์ก C ++ ยังมาพร้อมกับการใช้งานคุณสมบัติต่างๆเช่นการจัดคิวข้อความและมัลติเธรดรวมถึงเครื่องมือการสร้างแบบจำลองที่ช่วยให้คุณสามารถเชื่อมโยงส่วนประกอบและสร้างโค้ดโดยอัตโนมัติ
ในที่สุด หากคุณสนใจที่จะทราบข้อมูลเพิ่มเติมคุณสามารถปรึกษา ลิงค์ต่อไปนี้