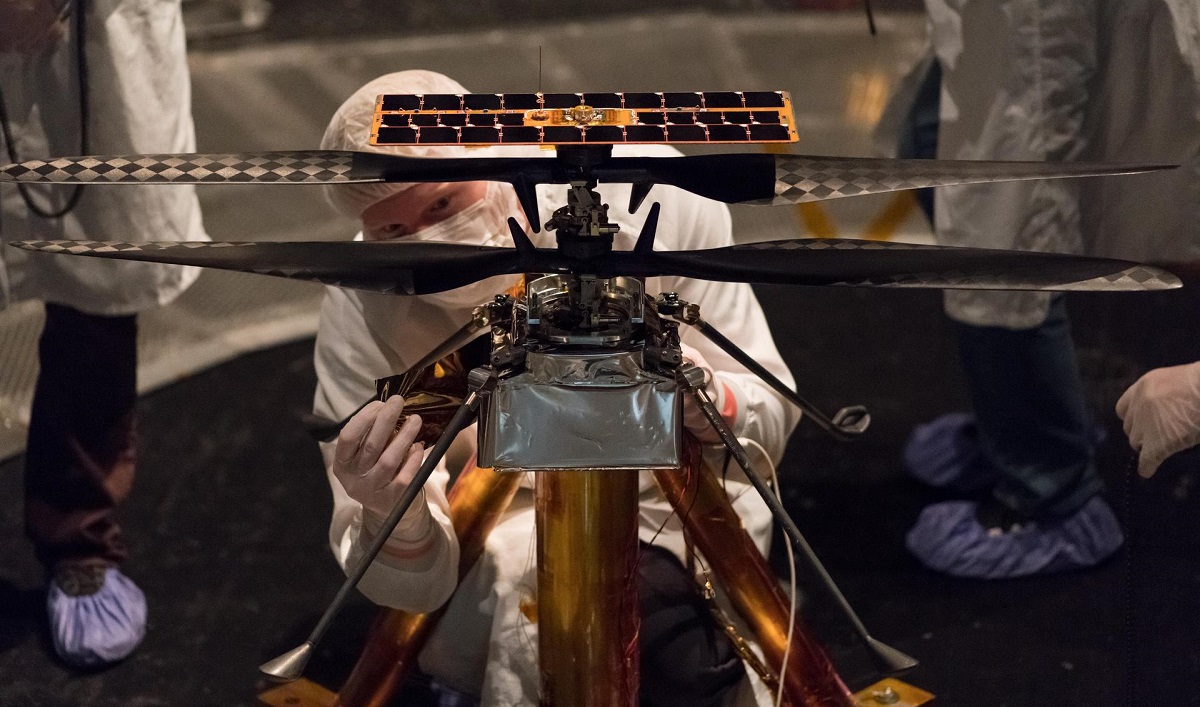
Pochi giorni fa rappresentanti dell'agenzia spaziale della NASA, in un'intervista con Spectrum IEEE, ha rivelato dettagli sull'elicottero da ricognizione autonomo Ingenuity, che è atterrato con successo su Marte come parte della missione Mars 2020.
Una caratteristica speciale progetto era l'uso di una scheda di controllo basata su SoC Qualcomm Snapdragon 801, che viene utilizzato nella produzione di smartphone. Il software Ingenuity si basa sul kernel Linux e sul software di volo open source.
Va notato che questo è il primo utilizzo di Linux su veicoli spaziali spedito al Marte. Inoltre, l'uso di software open source e componenti hardware disponibili in commercio consente agli appassionati interessati di assemblare da soli droni simili.
Questa decisione è dovuta al fatto che il controllo di un drone volante richiede molta più potenza di calcolo rispetto al controllo di un rover, che è dotato di chip appositamente realizzati con protezione dalle radiazioni aggiuntiva. Ad esempio, il mantenimento del volo richiede il funzionamento del circuito di controllo a una velocità di 500 cicli al secondo, nonché l'analisi delle immagini a una velocità di 30 fotogrammi al secondo.
Il SoC Snapdragon 801 (Quad Core 2,26 GHz, 2 GB di RAM, 32 GB di flash) viene utilizzato per fornire un ambiente di sistema basato su Linux di base, responsabile delle operazioni di alto livello come la navigazione visiva basata sull'analisi delle immagini della telecamera, la gestione dei dati, l'elaborazione dei comandi, la generazione della telemetria e la manutenzione dei canali di comunicazione wireless.
Processore si collega tramite interfaccia UART a due microcontrollori (MCU Texas Instruments TMS570LC43x, ARM Cortex-R5F, 300 MHz, 512 KB RAM, 4 MB Flash, UART, SPI, GPIO) che svolgono funzioni di controllo del volo.
I due microcontrollori servono per la ridondanza in caso di guasto e ricevere informazioni identiche dai sensori. Solo un microcontrollore è attivo e il secondo viene utilizzato come ricambio e in caso di guasto può assumere il controllo. FPGA MicroSemi ProASIC3L è responsabile del trasferimento dei dati dai sensori ai microcontrollori e interagendo con gli attuatori che controllano le pale, che passa anche a un microcontrollore sostitutivo in caso di guasto.
Della squadra, il drone utilizza un altimetro laser SparkFun Electronics, una società di hardware open source e uno dei creatori della definizione di hardware open source (OSHW). Tra gli altri componenti tipici, spiccano il girostabilizzatore (IMU) e le videocamere utilizzate negli smartphone.
Una fotocamera VGA viene utilizzata per tracciare la posizione, la direzione e la velocità attraverso confronti fotogramma per fotogramma. La seconda fotocamera a colori da 13 megapixel viene utilizzata per creare immagini dell'area.
Portare l'ingegno su Marte tutto d'un pezzo e farlo decollare e atterrare anche una sola volta è una vittoria definitiva per la NASA, ci dice Tim Canham del JPL.
Canham ha contribuito a sviluppare l'architettura software che esegue Ingenuity. In qualità di Operations Leader di Ingenuity, è ora concentrato sulla pianificazione del volo e sul coordinamento con il team di rover Perseverance. Abbiamo parlato con Canham per capire meglio come Ingenuity farà affidamento sull'autonomia per i suoi prossimi voli su Marte.
I componenti del software di controllo del volo sono stati sviluppati presso il JPL (Jet Propulsion Laboratory) della NASA per satelliti terrestri artificiali piccoli e ultracompatti (cubsat) e sono stati sviluppati per diversi anni come parte della piattaforma aperta F Prime (F´), distribuita sotto il Licenza Apache 2.0.
F Prime fornisce gli strumenti per il rapido sviluppo dei sistemi di controllo del volo e relative applicazioni incorporate. Il software di volo è suddiviso in singoli componenti con interfacce di programmazione ben definite.
Oltre a componenti specializzati, viene fornito un framework C ++ con l'implementazione di funzionalità come l'accodamento dei messaggi e il multithreading, nonché strumenti di modellazione che consentono di collegare componenti e generare automaticamente codice.
Infine se sei interessato a saperne di più, puoi consultare il seguente collegamento.